Final CAD of the ELEGOO Self Balancing Robot

I have completed my final CAD version of the ELEGOO self balancing robot. I ended up having to attempt a number of assemblies until I got it right. We still have not received the robot kit so I had to estimate most of the dimensions. Although my CAD’s dimensions are not to the exact scale of the actual robot itself, I think that they look similar enough.

This image shows the front and back view of the CAD. These images give a different viewing perspectives of the components within the assembly such as, the electronic board and the tray.
Wheel Assembly

The image above shows all of the components used in the wheel assembly. I first used a concentric mate to connect the wheel interior with the tire. In a separate assembly I connected the bracket with the motor wheel using coincident and concentric mates also. Finally I combined the two assemblies and connected the tire wheel assembly and the motor and bracket using a number of different mates.

When making the wheel interior I sketched a side view of the interior and used the revolve feature to create the circle shape. To make the spokes, I sketched onto the front face and created a circular pattern to repeat ten times (to create ten spokes) and then used the extruded cut feature. The tire shape itself was simple to create however, the tire tread design took a few attempts. I tried to replicate the tire tread design that is seen on the ELEGOO robot.
Electronic Board
The electronic board was one of the more challenging components to make. The photos online did not provide a great view of the electronic board so I had to estimate. I decided to make the board and sketch on to it, where I then used the extrude feature. I did this so that I could place the features exactly where I wanted them to be and not have to worry about the mating placements. However, I made the ultrasonic sensor separately and then mated it with the sensor stand on the board.

The smaller details
I added the three pushbuttons to the board by using the extruded feature and then I sketched onto the features and used the fillet feature to make the buttons. For the pins at the back, I extruded circles of diameter 0.75 mm to a length of 8 mm and then I used the chamfer feature to get the pointed effect. For the spikes on the three box features in the middle, I extruded circles of diameter 2 mm and then used the chamfer feature to create the spike effect. I also made the parts to hold the wires but unfortunately, I was unable to sketch and create them.
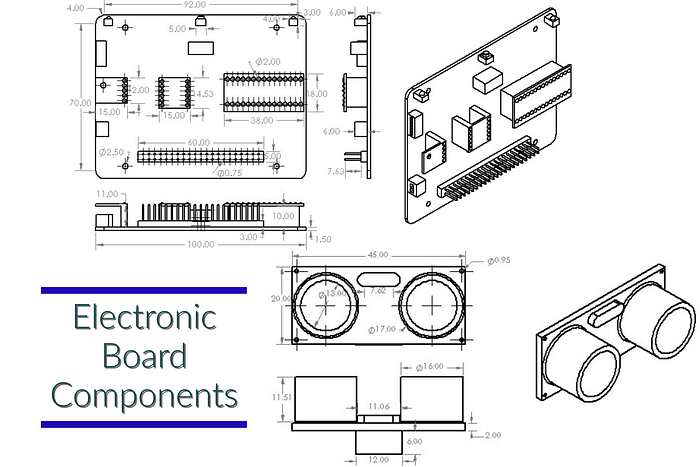
The image above displays all of the electronic board components. As aforementioned, most of the components are extruded from the electronic board itself. Therefore, the technical drawings with the dimensions are not the most clear.
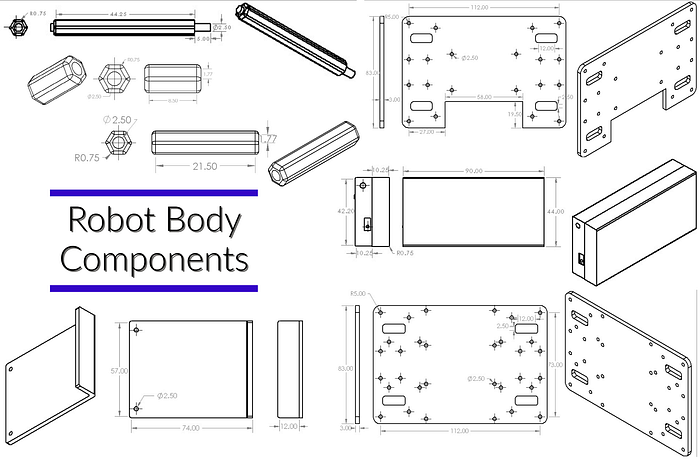
Body Structure
To assemble the body structure I used concentric mates to line the poles up with the corresponding holes and then coincident mates to connect them to the board. I used the images I found online as a reference to know which poles and holes to use. I then used countersunk flat head cross recess screws (ISO 7046–1 M 2.5) to match the images. I also inserted pan head cross recess screws (ISO 7045 M 2.5) into the bottom of the middle board to support the box.
Materials
Due to the lack of information about the materials used for the components of the ELEGOO robot, I had to guess the materials based on appearance from the online images. For the clear plastic components I used polypropylene and for the poles I used satin finish gold as they both match the appearance from the photos the best. In the wheel assembly I used matte zinc and sandblasted steel for the motors and I applied matte rubber to the tire. For the remaining components I used satin finish and low gloss plastic depending on the colour from the images. If I could change one material it would be the material of the motor from matte zinc to a glossier material such as, brushed chromium.
Conclusion
Although it took a long time, I am glad that I was able to produce a CAD version of the robot similar in appearance to the actual robot. I really did not have great Solidworks skills going into this assignment but after looking at my first drafts I can see that I have come a long way and am very happy with the result !!
